機器學習介紹 (Machine Learning)
引言
封面是本次 k nearest-neighbor 的模擬實驗結果。
所謂「機器學習」是
- 機器:即函數或演算法。
- 學習:以資料 (data-based) 作為基礎而非規則 (rule-based)。
機器學習作為資料科學的一個重要工具,其步驟可被拆解為 OCEMIC (最後的 C 與 I 合併)。
- 獲取 (Obtain)
- 清理 (Clean)
- 探索 (Explore)
- 建模 (Model)
- 解釋 (Interpret)
監督式學習 (Supervised Learning)
給定資料 $(\bs x_i, y_i)_{i = 1}^{n}$,目標是找出 $\bs x$ 與 $y$ 的關聯,因此選定 $f \in \mathcal F$ 在一個函數空間,並在最小化損失函數 $L$ 或風險 $R$ 的條件下找到最合適的 $f (\bs X) \approx Y$。可應用於預測。
例如手寫數字辨識,給定 $\bs x \in \bb R^{p \times p}$ 是像素資料,$y \in \left \lbrace \contio{9} \right\rbrace$,利用 if else 的規則來執行顯然不切實際,此時轉用基於資料 $(\bs x, y)$ 的方式,找出可行的 $f$。
非監督式學習 (Unsupervised Learning)
給定資料 $(\bs x_i)_{i = 1}^{n}$,其中 $\bs x_i = (x\_{i1}, x\_{i2}, \cdots, x\_{ip}) \in \bb R^p$,目標是找出 $x$ 之間的關聯,例如線性關係或是聚類。應用於推薦系統。
半監督式學習 (Semi-supervised Learning)
相較於監督式學習,半監督式學習的資料僅有部分的給定 $y$,例如上述的手寫數字辨識,可能基於成本使得僅有部分的資料有標記 $y$,因此更需要靠非監督式的方式找出 $\bs x$ 之間的關聯性,並用部分標記 $y$ 的資料建立監督式學習模型。
建模類型
監督式學習目標在建構一個合適的 $f$,一般分為兩種類別,分別對應 $f$ 對資料的敏感度。首先將資料分成兩部分,一部分用於訓練 (train) 模型,另一部分用於測試 (test) 模型的準確度。
全局 (Global)
以回歸 (regression) 作為代表,例如線性回歸對於新資料的預測,是 $\bs X$ 的線性組合,寫作
$$ \hat Y (\bs X) = \beta_0 + \sum_{j = 1}^{p} \beta_j X_j $$在這系列能找到更多深入的討論。回歸模型往往會帶有較強的資料假設,例如常態假設 (normal assumption)
$$ Y_i = \beta_0 + \sum_{j = 1}^{p} \beta_j X_{ij} + \varepsilon_i $$其中 $\varepsilon_i \iid N (0, \sigma^2)$,對整體趨勢能較好的描述,但容易被偏離值 (outlier) 影響。
局部 (Local)
以近鄰演算法 (nearest-neighbor, knn) 作為代表,對於新資料的預測,會根據其 $x$ 最近的 $k$ 個點所對應的 $y$ 數值的平均 (或眾數),稱為 $k$-近鄰演算法 ($k$-nearest neighbor),定義為
$$ \hat Y (x) = \frac{1}{k} \sum_{x_i \in N_k (x)} y_i $$其中的 $N_k (x)$ 是距離 $x$ 最近的 $k$ 個 $x_i$。或者是找尋給定半徑的資料點平均 (或眾數)
$$ \hat Y (x) = \frac{1}{k} \sum_{x_i \in B_r (x)} y_i $$其中的 $B_r (x) = \left\lbrace z : |z - x| \leq r \right\rbrace$,即以 $x$ 為中心,半徑為 $r$ 的圓。最後,由於 $Y \in \left\lbrace 0, 1 \right\rbrace$,會透過一個轉換函數轉換輸出數值
$$ \hat G (x) = I (\hat Y (x) > 0.5) $$而局部模型一般帶有較弱的資料假設,例如「相近的 $x$,帶有相近的 $y$」,因此即使資料在局部有較多的變化,nearest-neighbor 也能較為合適的貼近;相對的,卻很難描述出全局的資料變動趨勢。
全局 vs 局部
| 全局 | 局部 | |
|---|---|---|
| 強項 | 整體趨勢 | 局部特徵 |
| 弱點 | 受偏離值 (outlier) 影響 | 過度擬合 (overfitting) |
| 特徵 | 高 bias / 精度低 ($y$ 與 $\hat y$ 差距大) | 高 variance / 不穩定 (train 和 test 精確度差距大) |
| 解釋性 | 高 | 低 |
接下來會給出兩個範例,每個資料 $(X_1, X_2, Y)$ 其中 $Y \in \left\lbrace 0, 1 \right\rbrace$。train 有 200 點,test 有 10000 點。
- 範例一:資料來自 2 個獨立且不同中心的二維常態分佈,每組資料 100 點,第 1 組資料的 $Y$ 標記為 0,第 2 組資料的 $Y$ 標記為 1。
- 範例二:資料來自 20 個獨立且不同中心的二維常態分佈,每組資料 10 點,前 5 組資料的 $Y$ 標記為 0,後 5 組資料的 $Y$ 標記為 1。
範例一
給定
- $ X_1, X_2, \cdots, X_{100} \iid N_2 ((0, 0)^T, I)$
- $ X_{101}, X_{102}, \cdots, X_{200} \iid N_2 ((1, 1)^T, I)$
且
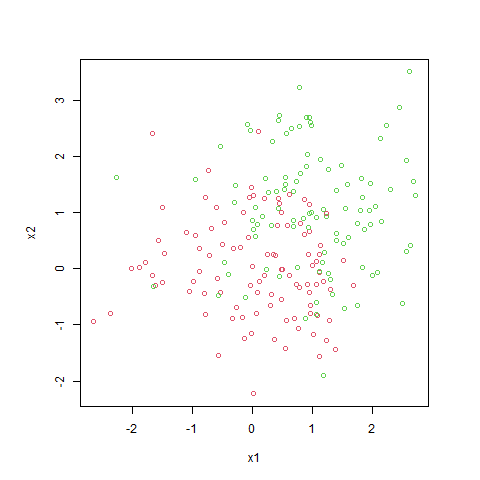
$$ y_i = \begin{cases} 0 & \text{if } 1 \leq i \leq 100 \\ 1 & \text{if } 101 \leq i \leq 200 \end{cases} $$紅點標記為 $y = 0$,綠點標記為 $y = 1$。
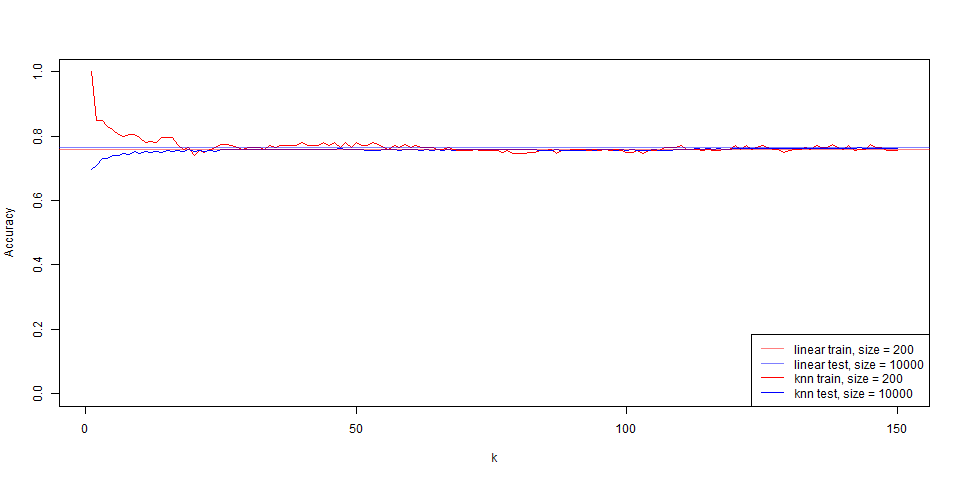
繪製出 linear regression $f (\bs x) = 0.5$ 的區域,其 train 與 test 準確度均約為 76%。

對這筆資料進行 nearest-neighbor。
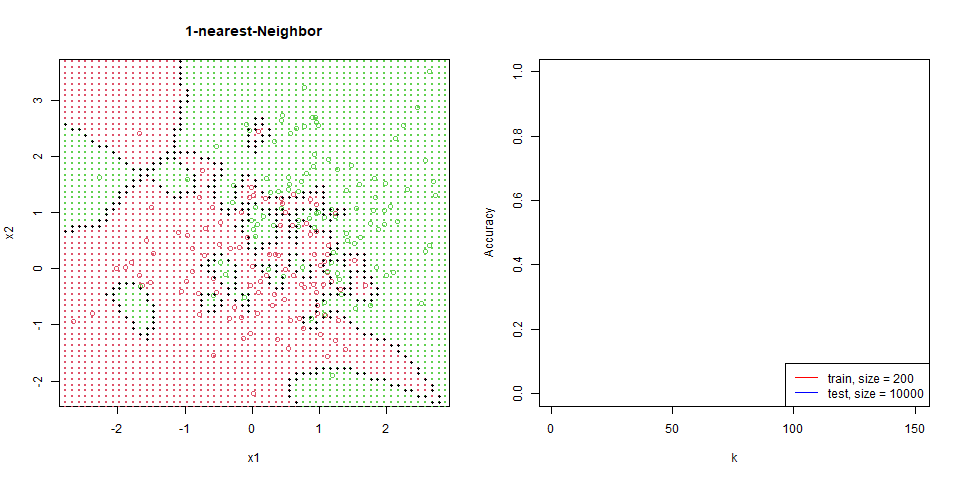
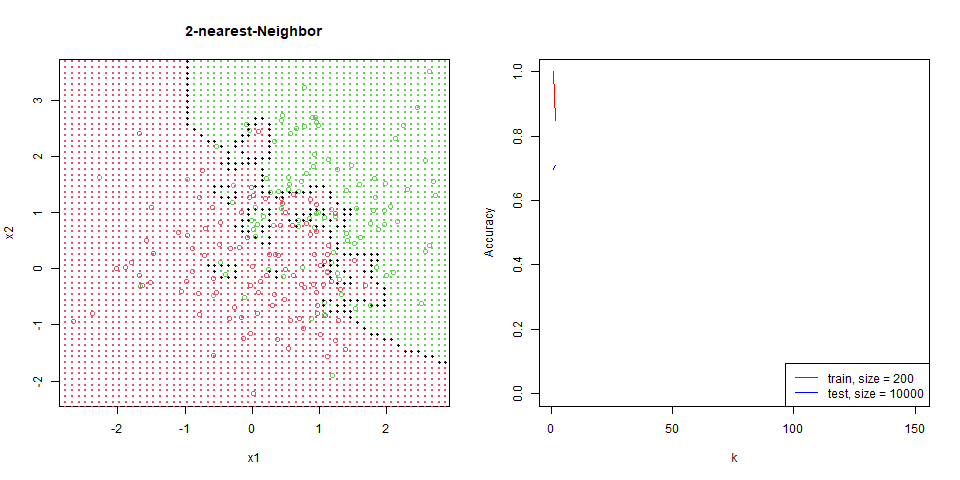
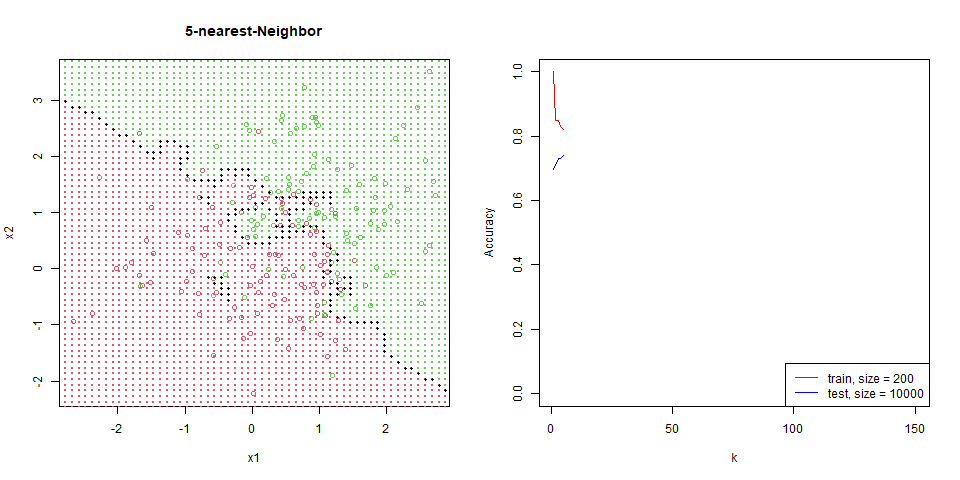
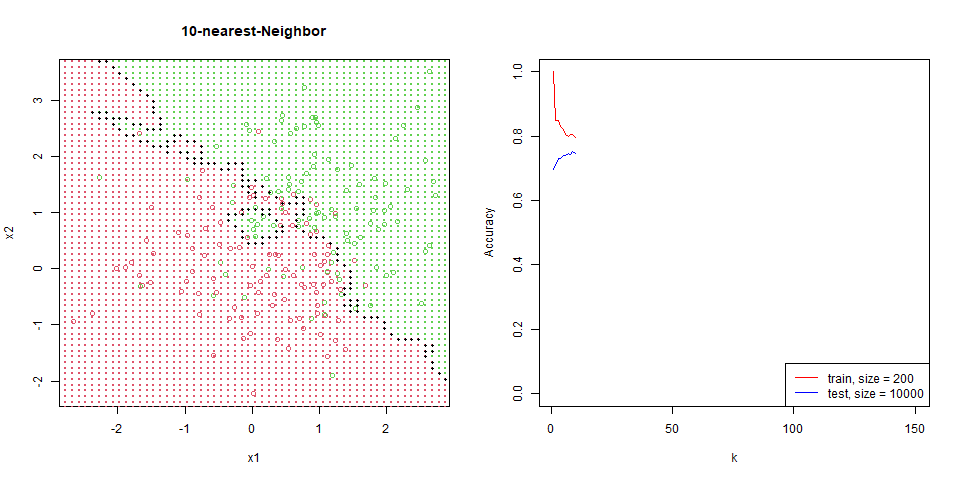
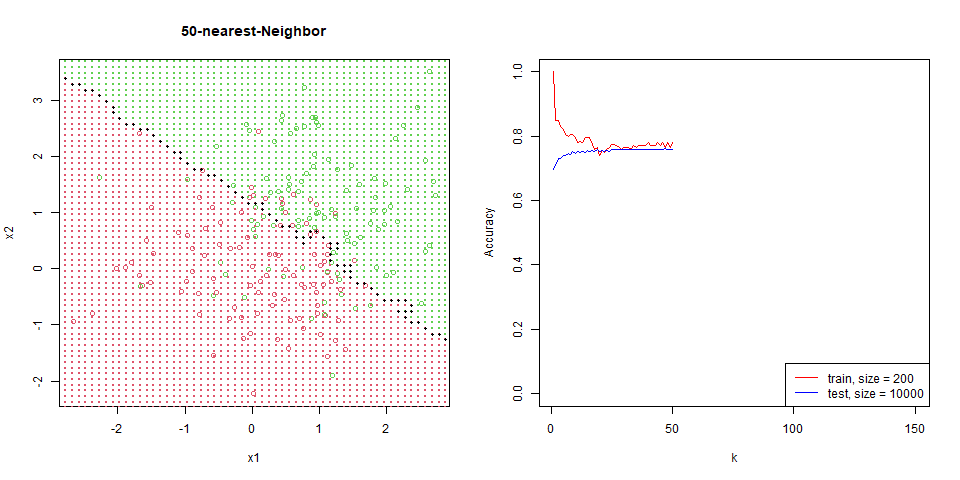
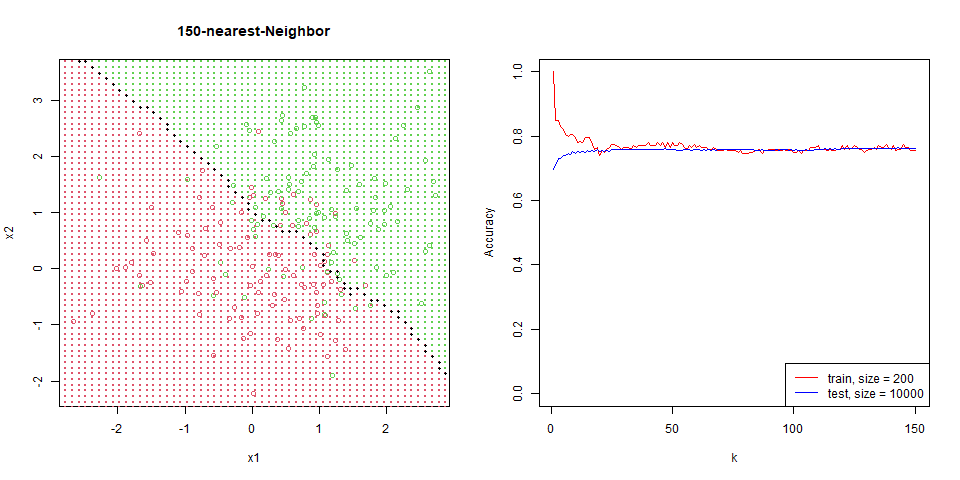
能看到隨著 $k$ 增加,分區線逐漸變的平滑。
在這筆資料下的比對,能看出 regression 是非常穩定的,test 和 train 變化量並不大,而 knn 表現也逐漸趨於一致。
範例一 R 語言
給出範例一的程式。載入 packages
library(dplyr)
library(tidyverse)
library(MASS)
分別生成出 train 和 test。
# generate data
n = 200 # train size
m = 10000 # test size
mu.0 = c(0, 0) # center of y 0
mu.1 = c(1, 1) # center of y 1
Sigma = matrix(c(1, 0, 0, 1), nrow = 2) # variance
set.seed(0) # random seed
# calculate
n.2 = n / 2
m.2 = m / 2
train = mvrnorm(n.2, mu = mu.0, Sigma = Sigma) %>%
rbind(mvrnorm(n.2, mu = mu.1, Sigma = Sigma)) %>%
cbind(y = c(rep(0, n.2), rep(1, n.2))) %>%
data.frame() %>%
rename(x1 = V1, x2 = V2)
test = mvrnorm(m.2, mu = mu.0, Sigma = Sigma) %>%
rbind(mvrnorm(m.2, mu = mu.1, Sigma = Sigma)) %>%
cbind(y = c(rep(0, m.2), rep(1, m.2))) %>%
data.frame() %>%
rename(x1 = V1, x2 = V2)
background = expand.grid(seq(-5, 5, length.out = 100),
seq(-5, 5, length.out = 100)) %>%
rename(x1 = Var1, x2 = Var2)
# plot
par(pty = "s")
plot(train$x1, train$x2, col = train$y + 2, xlab = "x1", ylab = "x2")
linear regression 預測。
# linear regression
linear = lm(y ~ x1 + x2, train)
background$y = sapply(predict(linear, background), function(x){ if (x > 0.5) 1 else 0})
par(pty = "s")
plot(train$x1, train$x2, col = train$y + 2, xlab = "x1", ylab = "x2", main = "Linear Regression")
points(background$x1, background$x2, col = background$y + 2, pch = 19, cex = 0.1)
abline(a = (0.5 - linear$coefficients[1]) / linear$coefficients[3],
b = -linear$coefficients[2] / linear$coefficients[3])
# accuracy
linear.train = sapply(predict(linear, train), function(x){ if (x > 0.5) 1 else 0})
linear.train.acc = sum(linear.train == train$y) / n
linear.test = sapply(predict(linear, test), function(x){ if (x > 0.5) 1 else 0})
linear.test.acc = sum(linear.test == test$y) / m
knn 預測
# Nearest-Neighbor
library(FNN)
max.k = 150 # max k-near
train.acc = rep(NA, max.k)
test.acc = rep(NA, max.k)
for(k in 1:max.k){
if (k %% 10 == 0){ print(k) }
# calculate
background.knn = knn.reg(train = train[, 1:2], test = background[, 1:2], y = train[, 3], k = k)
background$y = sapply(background.knn$pred, function(x){ if (x > 0.5) 1 else 0})
train.knn = knn.reg(train = train[, 1:2], test = train[, 1:2], y = train[, 3], k = k)
train.pred = sapply(train.knn$pred, function(x){ if (x > 0.5) 1 else 0})
train.acc[k] = sum(train.pred == train$y) / n
test.knn = knn.reg(train = train[, 1:2], test = test[, 1:2], y = train[, 3], k = k)
test.pred = sapply(test.knn$pred, function(x){ if (x > 0.5) 1 else 0})
test.acc[k] = sum(test.pred == test$y) / m
# plot nearest-Neighbor
par(mfrow = c(1, 2))
plot(train$x1, train$x2, col = train$y + 2, xlab = "x1", ylab = "x2", main = paste0(k, "-nearest-Neighbor"))
points(background$x1, background$x2, col = background$y + 2, pch = 19, cex = 0.1)
# plot black dots
for(i in 1:100){
for(j in 1:99){
if(background[(i - 1) * 100 + j, 3] != background[(i - 1) * 100 + j + 1, 3]){
points(background[(i - 1) * 100 + j, 1:2], pch = 19, cex = 0.5)
}
if(background[(j - 1) * 100 + i, 3] != background[j * 100 + i, 3]){
points(background[(j - 1) * 100 + i, 1:2], pch = 19, cex = 0.5)
}
}
}
# plot Accuracy
plot(train.acc, ylim = c(0, 1), xlab = "k", ylab = "Accuracy", type = "l", col = "red")
points(test.acc, type = "l", col = "blue")
legend("bottomright",
c(paste0("train, size = ", n),
paste0("test, size = ", m)),
col = c("red", "blue"),
lty = 1)
}
對比圖
# compare linear and knn
plot(train.acc, ylim = c(0, 1), xlab = "k", ylab = "Accuracy", type = "l", col = "red")
points(test.acc, type = "l", col = "blue")
abline(h = linear.train.acc, col = rgb(1, 0, 0, alpha = 0.5))
abline(h = linear.test.acc, col = rgb(0, 0, 1, alpha = 0.5))
legend("bottomright",
c(paste0("linear train, size = ", n),
paste0("linear test, size = ", m),
paste0("knn train, size = ", n),
paste0("knn test, size = ", m)),
col = c(rgb(1, 0, 0, alpha = 0.5), rgb(0, 0, 1, alpha = 0.5), "red", "blue"),
lty = 1)
範例二
隨機生成資料中心點
- 組別一:$ m_{1}, m_{2}, \cdots, m_{10} \iid N_2 ((1, 0)^T, I)$
- 組別二:$ m_{11}, m_{12}, \cdots, m_{20} \iid N_2 ((0, 1)^T, I)$
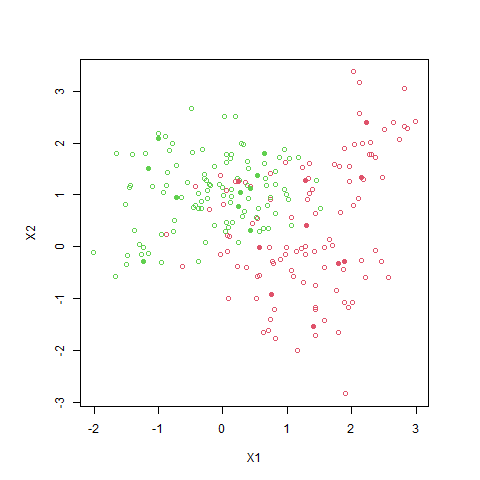
每組再生成 100 筆資料,每筆資料有 $1 / 10$ 的機率選擇組內 $m_k$ 為中心,生成一個 $N_2 (m_k, I / 5)$,第一組資料的 $y$ 標記為 0 (紅色),第二組資料的 $y$ 標記為 1 (綠色),圖中的實心點為 $\contia{m}{20}$。
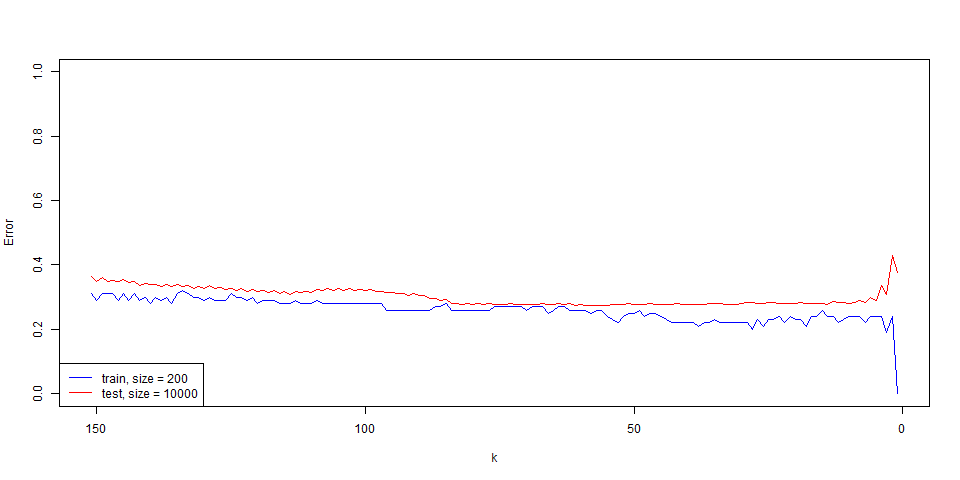
其 knn 的表現出
- train: 錯誤率隨著 $k$ 在 150
10 的區間減少,$k$ 在 101 時的錯誤率減少的速度又更快。 - test: 錯誤率隨著 $k$ 在 150
10 的區間減少,但 $k$ 在 101 時的錯誤率又直線上升。
對 $k$ 做 log 轉換
![]()
- $k$ 太小 ($k < 10$) 會 over fitting。
- $k$ 在中間 ($7 < k < 67$) 表現較佳
- 從自由度 $N / k$ 的角度更能看出變化趨勢。
範例二 R 語言
加載 package
library(dplyr)
library(tidyverse)
library(MASS)
生成資料點的函式
# generate data
oracle = function(n, rand.seed = 1){
# oracle means
mu.0 = c(1, 0)
mu.1 = c(0, 1)
# class means
set.seed(0)
means.0 = mvrnorm(n = 10, mu = mu.0, Sigma = diag(2))
means.1 = mvrnorm(n = 10, mu = mu.1, Sigma = diag(2))
# observation
set.seed(rand.seed)
data.0 = sapply(1:n, function(i){
mvrnorm(1, mu = means.0[sample(1:10, 1), ], Sigma = diag(2) / 5)
}) %>% t() %>% data.frame() %>% cbind(y = 0)
data.1 = sapply(1:n, function(i){
mvrnorm(1, mu = means.1[sample(1:10, 1), ], Sigma = diag(2) / 5)
}) %>% t() %>% data.frame() %>% cbind(y = 1)
data = rbind(data.0, data.1)
}
設定 sample size
# sample size for 1 class
train.size = 100
test.size = 5000
train = oracle(train.size)
test = oracle(test.size, rand.seed = 1234)
par(pty = 's')
plot(train[, 1:2], col = train$y + 2)
執行 knn
# knn package
library(FNN)
max.k = 151 # max k-near
train.err = rep(NA, max.k)
test.err = rep(NA, max.k)
# calculate train and test error of each k
for(k in 1:max.k){
if (k %% 10 == 0){print(k)}
# for train part
train.knn = knn.reg(train = train[, 1:2], test = train[, 1:2], y = train[, 3], k = k)
train.pred = ifelse(train.knn$pred > 0.5, 1, 0)
train.err[k] = sum(train.pred != train$y) / train.size
# for test part
test.knn = knn.reg(train = train[, 1:2], test = test[, 1:2], y = train[, 3], k = k)
test.pred = ifelse(test.knn$pred > 0.5, 1, 0)
test.err[k] = sum(test.pred != test$y) / test.size
}
畫出原始的 error 圖
# plot error
plot(train.err, ylim = c(0, 1), xlim = c(max.k, 1),
xlab = "k", ylab = "Error",
type = "l", col = "blue")
points(test.err, type = "l", col = "red")
legend("bottomleft",
c(paste0("train, size = ", train.size * 2),
paste0("test, size = ", test.size * 2)),
col = c("blue", "red"),
lty = 1)
做 $\log_{10}$ 的轉換 error 圖
# plot error with transformation
library(ggplot2)
# plot breaks
Nk = c(1, 2, 3, 5, 8, 12, 18, 29, 40, 67, 200)
ks = c(151, 101, 67, 41, 25, 17, 11, 7, 5, 3, 1)
plot.err = data.frame(x = Nk, train = train.err[ks], test = test.err[ks])
ggplot(plot.err, aes(x = x)) +
geom_line(aes(y = train, color = "Train")) +
geom_point(aes(y = train, color = "Train")) +
geom_line(aes(y = test, color = "Test")) +
geom_point(aes(y = test, color = "Test")) +
scale_x_continuous(breaks = Nk, trans = "log10",
sec.axis = sec_axis(~200/., breaks = ks, name = "k") ) +
labs(x = "N / k", y = "Error") +
scale_color_manual(values = c("red", "blue"), name = "Legend", labels = c("Test", "Train")) +
theme(legend.position = c(0.1, 0.1)) # 圖例位置
沒有白吃的午餐定理 (No Free Lunch Theorem)
下面兩張圖分別是對應不同資料集的模型精確度,能看出圖一選擇線性回歸,圖二選擇小 $k$ 的近鄰演算法可能是較好的選項。

上述案例中能看出,沒有一種機器學習能夠在所有問題上表現最好,又稱為 沒有白吃的午餐定理 (No Free Lunch Theorem),可以想像成沒有一種午餐能滿足所有人。因此機器學習沒有通用的最佳解,需要根據問題與資料選模型。
統計決策理論 (Statistical Decision Theory)
決策理論告訴我們「一個模型能達到的最好程度」。舉例來說,若母體取樣來自各半的 $X_1 \sim \unif (0, 2)$ 與 $X_2 \sim \unif (1, 3)$。若採樣的 $X \in (0, 1)$,則 $X$ 可以保證來自 $X_1$;相似的,若採樣的 $X \in (2, 3)$,則 $X$ 可以保證來自 $X_2$;若 $X \in (1, 3)$,則說 $X$ 來自 $X_1$ 或 $X_2$ 都僅有一半的正確率,因此在此問題下能達到的最好正確率只有75%。實際問題中,不知道背後真實的母體分配,因此會靠重抽 (boosting) 等方式來模擬母體的分配。
現假設 $Y$ 是連續型變數,要刻劃模型的適配程度,首先定義 loss function (損失函數)
$$ L (Y, f (X)) = L (Y, \hat Y) $$目標是要最小化損失,因此定義 expected (squared) prediction error,同時也是 Bayes risk
$$ \begin{align*} EPE (f) & = E_Y [L (Y, f (X))] \newline & = E_X E_{Y | X} [L (Y, f (X)) | X] \end{align*} $$而在 squared loss function $L (Y, f (X)) = (Y - f(X))^2$ 底下,最小化 EPE 可以寫成
$$ \begin{align*} \hat f (x) & = \argmin_{c \in \bb R} E_{Y | X} [(Y - c)^2 | X = x] \newline & = E (Y | X = x) \end{align*} $$這樣的 $\hat f$ 也被稱之為 regression function (回歸函數),意指在給定 $X = x$ 條件下,$Y$ 最有可能的數值。而在 $Y \in \mathcal G$ 是類別型變數時,則會改取眾數
$$ \begin{align*} \hat G (x) & = \argmax_{g \in \mathcal G} P (g | X = x) \end{align*} $$